|
Mike Zhang I'm currently a roboticist at the Robotics and AI Institute working on whole-body control of humanoid robots, mostly working with Atlas from Boston Dynamics. Previously, I was research engineer at the Robotic Systems Lab in ETH Zurich, where I worked on mobile manipulation with ALMA, our legged robot with an arm. I also did my Master's in Robotics (with distinction) at ETH Zurich, where I worked on a variety of projects in the topics of geometric computer vision, automated robot design, learning-based control, and high-level task planning with Large Language Models. |

|
Publications |
|
ZEST: Zero-shot Embodied Skill Transfer for Athletic Robot Control
Jean Pierre Sleiman, He Li, Alphonsus Adu-Bredu, Robin Deits, Arun Kumar, Kevin Bergamin, Mohak Bhardwaj, Scott Biddlestone, Nicola Burger, Matthew A. Estrada, Francesco Iacobelli, Twan Koolen, Alexander Lambert, Erica Lin, M. Eva Mungai, Zach Nobles, Shane Rozen-Levy, Yuyao Shi, Jiashun Wang, Jakob Welner, Fangzhou Yu, Mike Zhang, Alfred Rizzi, Jessica Hodgins, Sylvain Bertrand, Yeuhi Abe, Scott Kuindersma, Farbod Farshidian arxiv preprint, 2026 arxiv |
|
|
Tag Map: A Text-Based Map for Spatial Reasoning and Navigation with Large Language Models Mike Zhang, Kaixian Qu, Vaishakh Patil, Cesar Cadena, Marco Hutter Conference on Robot Learning (CoRL), 2024 project page | paper | arxiv We propose to represent a scene as a database of viewpoints indexed by text tags of the recognized things at each viewpoint. The representation is extremely memory efficient and easily integrates with an LLM for planning and spatial reasoning grounded on the scene context. |
|
|
Learning to Open and Traverse Doors with a Legged Manipulator
Mike Zhang, Yuntao Ma, Takahiro Miki, Marco Hutter Conference on Robot Learning (CoRL), 2024 video | paper | arxiv We train a legged robot with an arm to robustly traverse through a variety of doors without prior knowledge of the door's opening direction, instead estimating these properties during the task interaction. |
Projects |
|
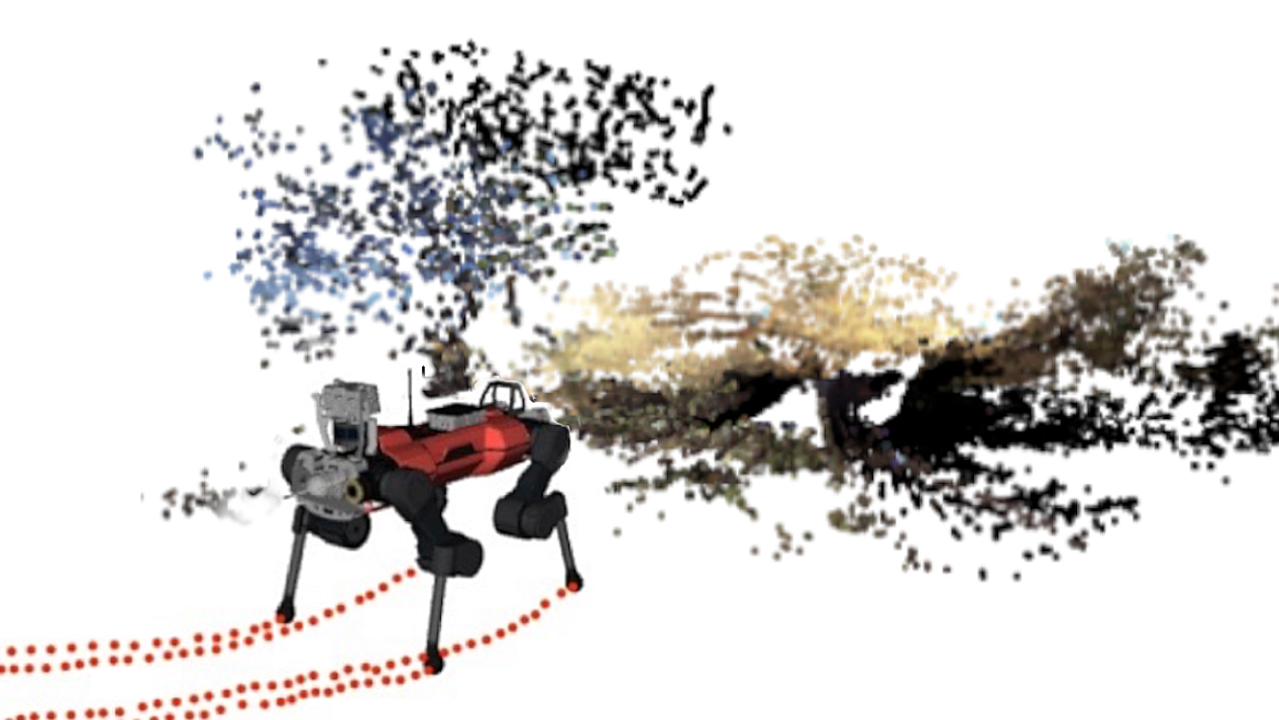
Semantic Front-End Filter Going to the Jungle
Perception and Learning for Robotics, ETH Zurich, 2022 poster Self-supervised learning of a filter for reconstructing the walkable terrain in dense vegetation from semantic point cloud measurements. |
|
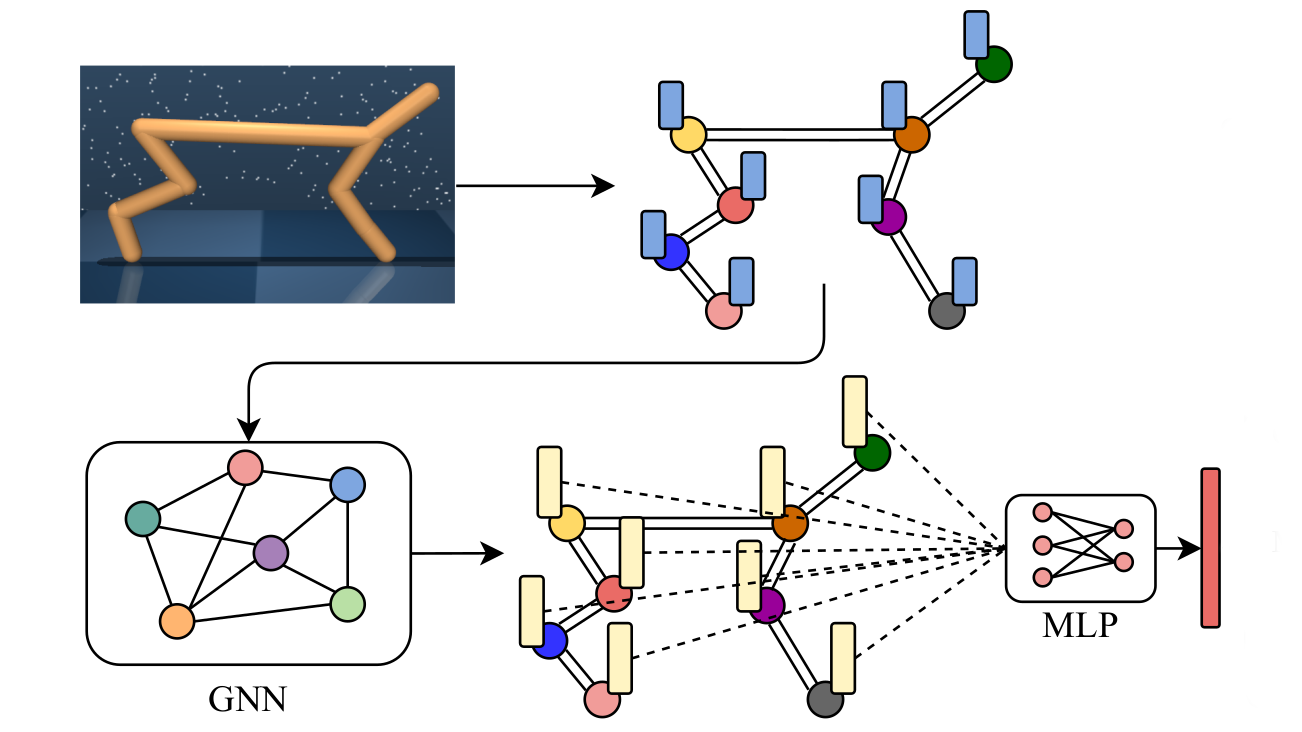
On the Origins of Robot Morphologies
Foundations of Reinforcement Learing, ETH Zurich, 2021 report | poster A policy is trained using Reinforcement Learning on evolutionary rollouts, learning how to best change a robot's morphology for optimizing its performance in a given task. |
|
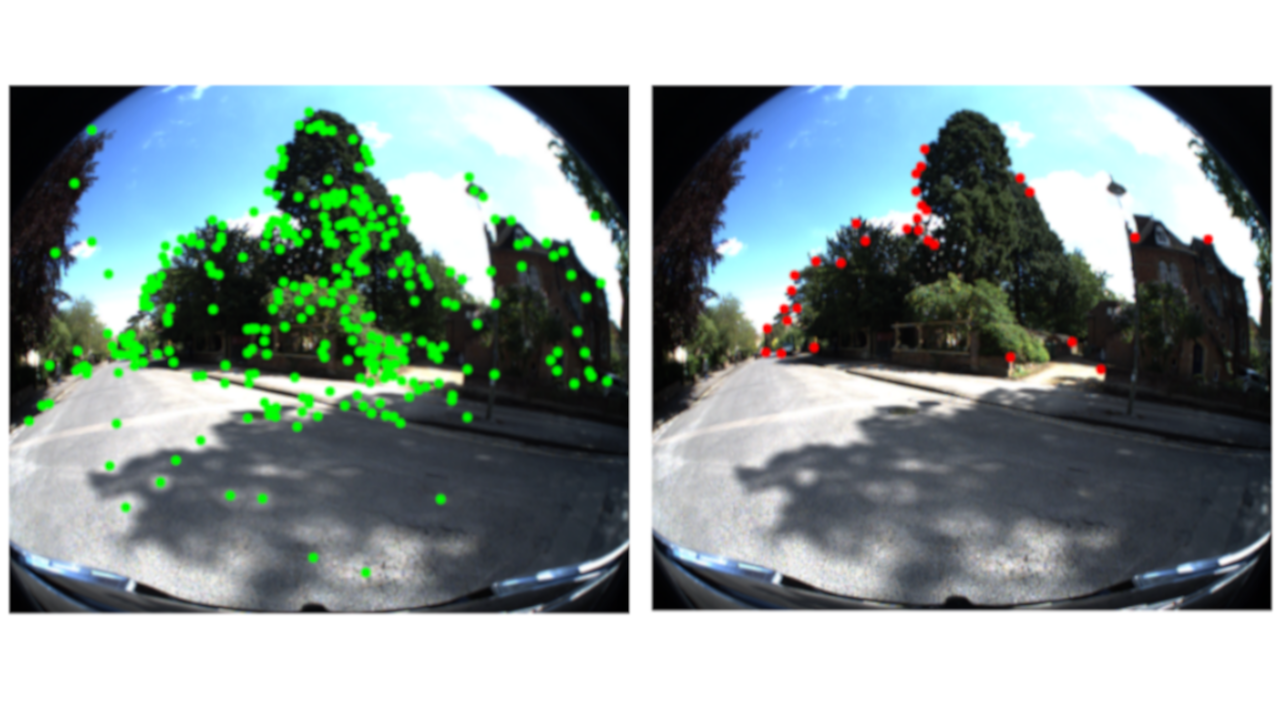
Evaluating Visual Odometry & SLAM Initialization Methods for Arbitrary Multi-Camera Rigs 3D Vision, ETH Zurich, 2021 report A study on the various factors contributing to the initialization quality for visual odometry and SLAM pipelines in multi-camera systems. |
TeachingRobot Dynamics Head Teaching Assistant ETH Zurich, Fall 2024 Advanced Model Predictive Control ETH Zurich, Spring 2023 Programming for Robotics - ROS ETH Zurich, Spring 2023 Robot Dynamics ETH Zurich, Fall 2021 |
Misc |